Changelog: Release 2.0.14-totem.2 · totemmaker/TotemArduinoBoards · GitHub
RoboBoard X4 CAN bus
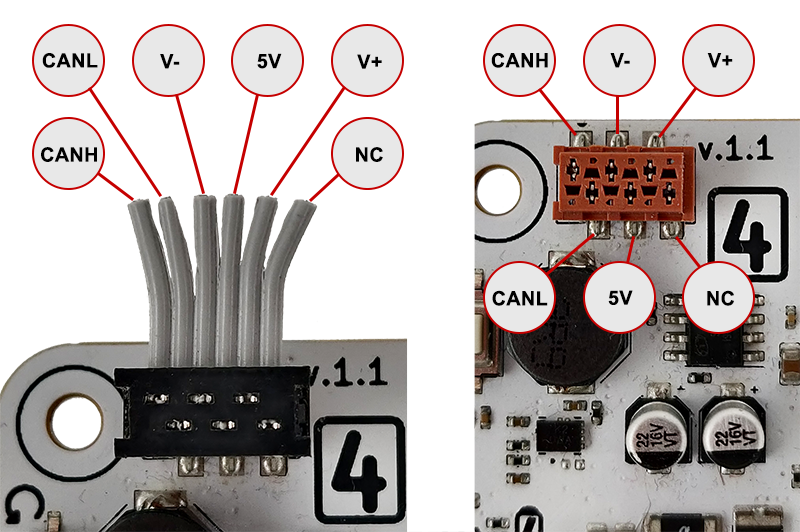
Now you can connect X4 to CANbus networks and read or write messages using C++ code.
void setup() {
// Start CAN peripheral at 500kbps
CAN.begin(500);
}
void loop() {
// Wait for CAN packet receive. 300ms timeout
if (CAN.readPacketWait(300)) {
// Get received packet
auto packet = CAN.getPacket();
// packet.id, packet.data, packet.len, packet.ext, packet.rtr
}
// Send CAN packets
uint8_t data[8] = {1,2,3,4,5,6,7,8};
CAN.writePacketExt(0x112233, data, 8); // Extended
CAN.writePacketStd(0x1AB, data, 8); // Standard
}
Documentation: CAN. (X4) - Totem Documentation
Examples: Examples → RoboBoard → CAN
Monitor CAN trafic
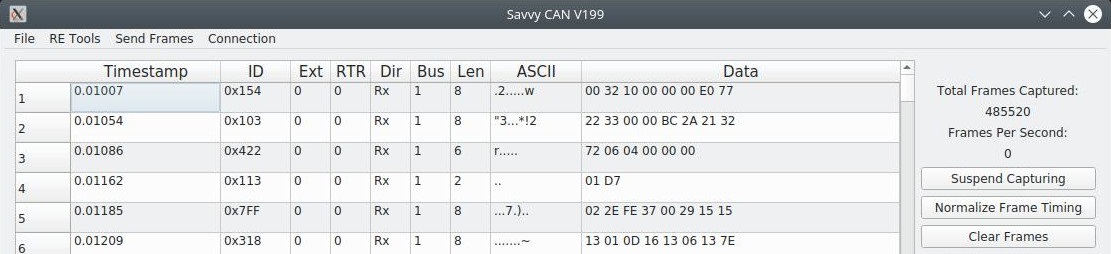
You can use open source SavvyCAN for CAN bus traffic monitor.
For setup instructions check: https://github.com/totemmaker/ESP32RET
RoboBoard X3 v3.1
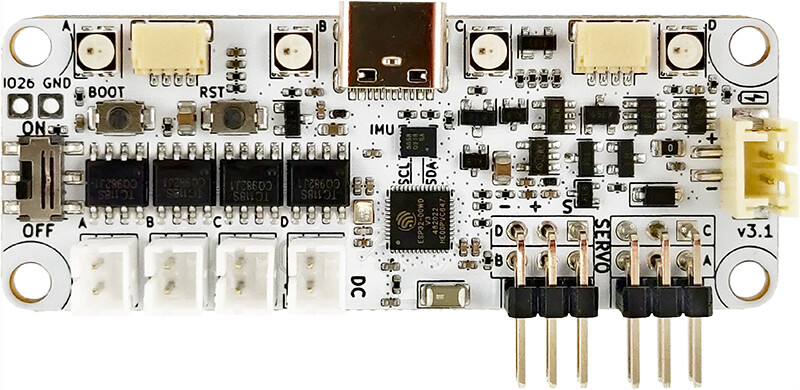
Included support for latest RoboBoard X3 revision. This one has total of 4 servo motors and some other improvements. For full list check RoboBoard X3 - Totem Documentation
Shop: RoboBoard X3 - Programmable Robot Development Kit | Totemmaker.net